Geometric Constraint as General Interface for Robot Manipulation





Framework Overview
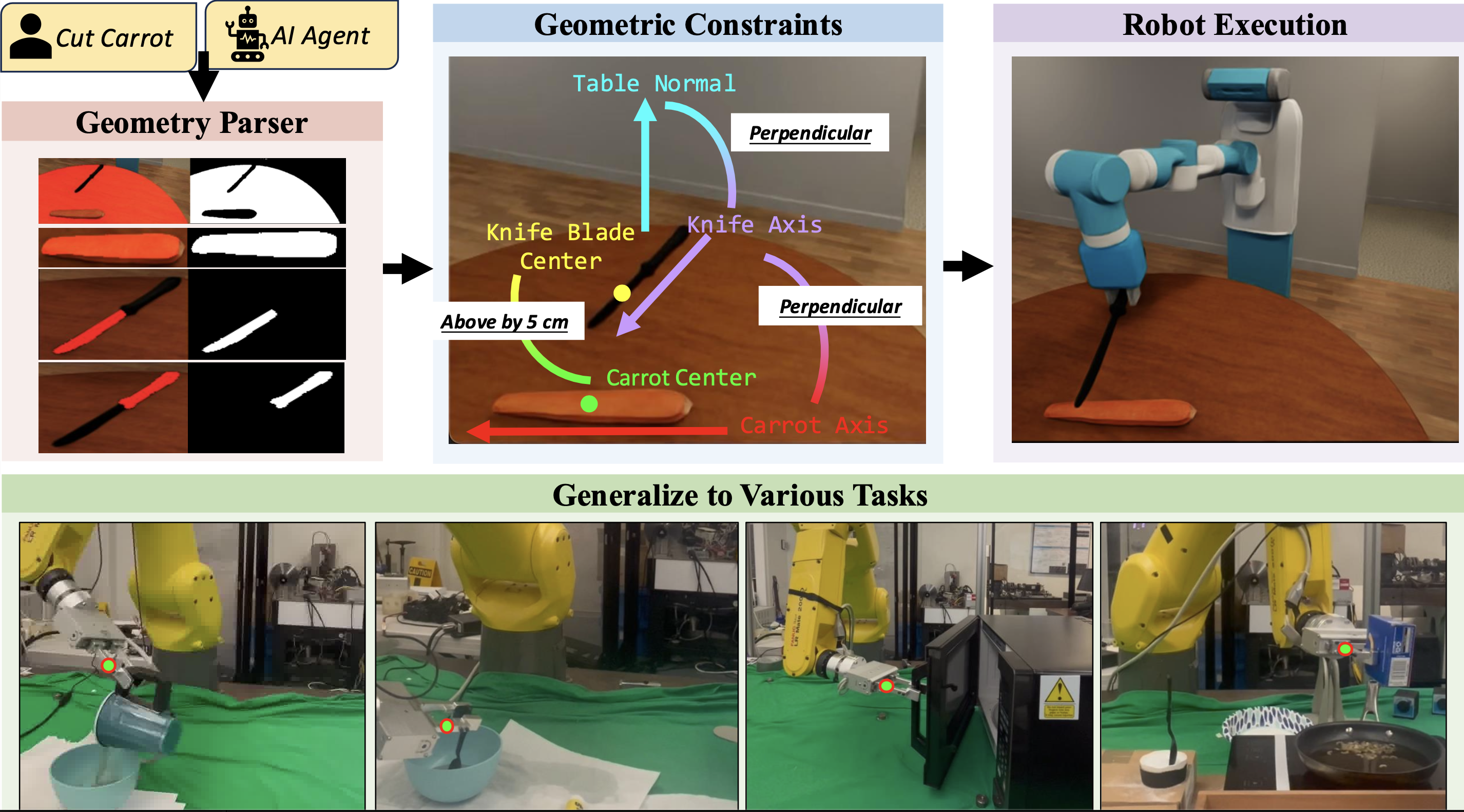
Given language instruction, our framework:
- (1). Task decomposition and flow control generation.
- (2). Geometric constraints generation for each stage.
- (3). Parse geometry.
- (4). Translate geometric constraints into cost functions
- (5). Solve for the trajectory with optimization to minimize the overall costs
- (6). The robot executes according to predicted gripper's poses and trajectory.
Geometry Parser
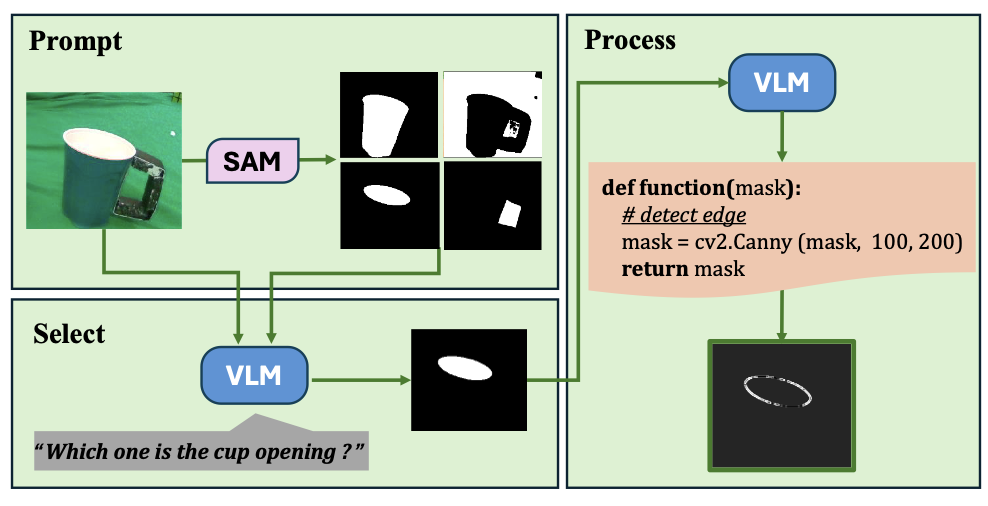
Given language description of the geometric part, the module:
- (1). Use GroundingDINO to locate object.
- (2). Apply Segment Anything Model to generate all part-level masks.
- (3). Ask VLM model to select the mask corresponding to the object part.
- (4). Ask VLM model to generate post-processing function to process the object part mask.